Publications
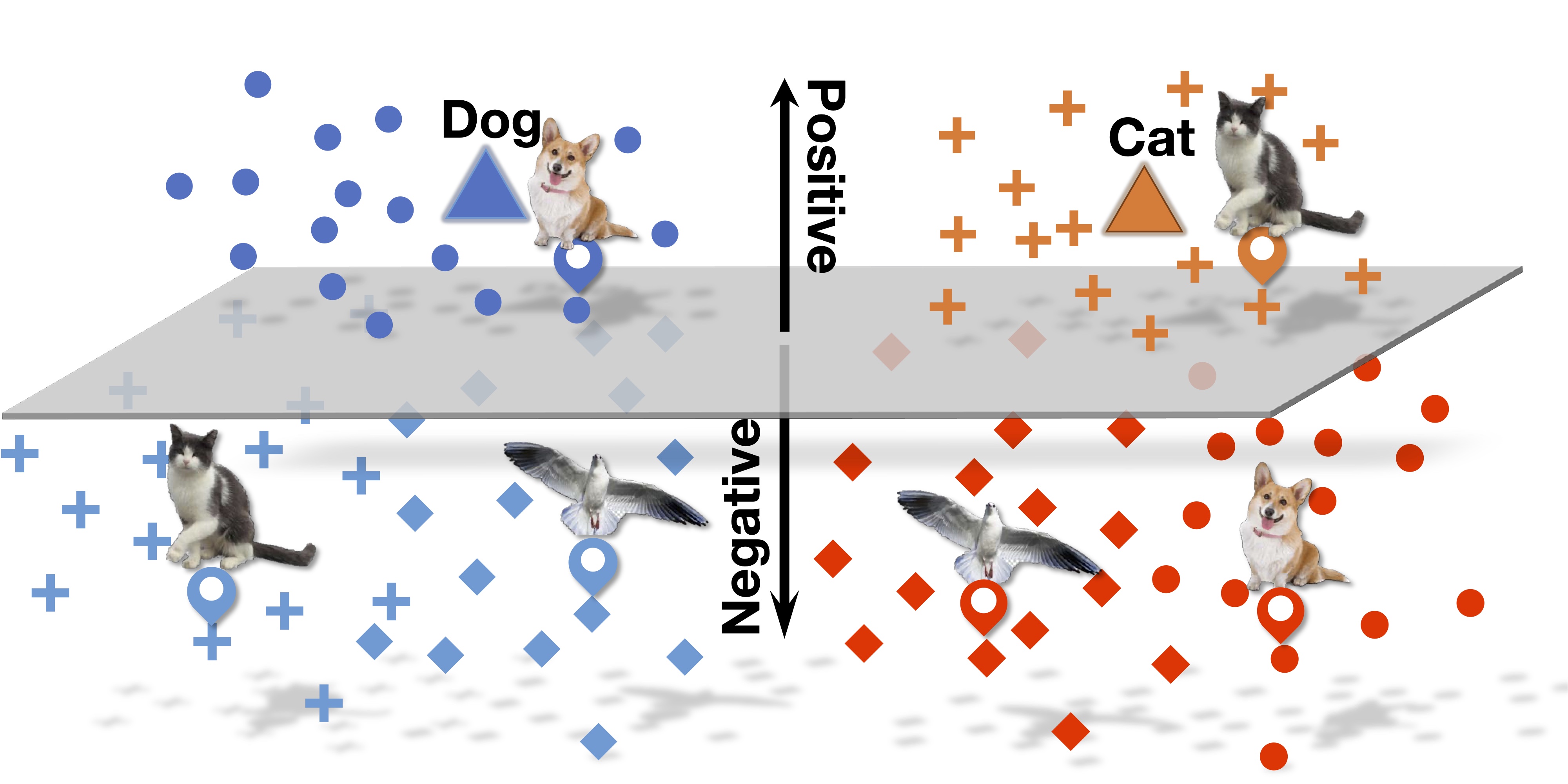
TAFE-Net: Task-Aware Feature Embeddings for Low Shot Learning
CVPR 2019 We propose Task-Aware Feature Embedding Networks (TAFE-Nets) to learn how to adapt the image representation to a new task in a meta learning fashion.
Hierarchical Discrete Distribution Decomposition for Match Density Estimation
CVPR 2019 We propose Hierarchical Discrete Distribution Decomposition (HD^3), a framework suitable for learning probabilistic pixel correspondences in both optical flow and stereo matching.
Semantic Predictive Control for Explainable and Efficient Policy Learning
ICRA 2019 We propose a driving policy learning framework that predicts feature representations of future visual inputs.
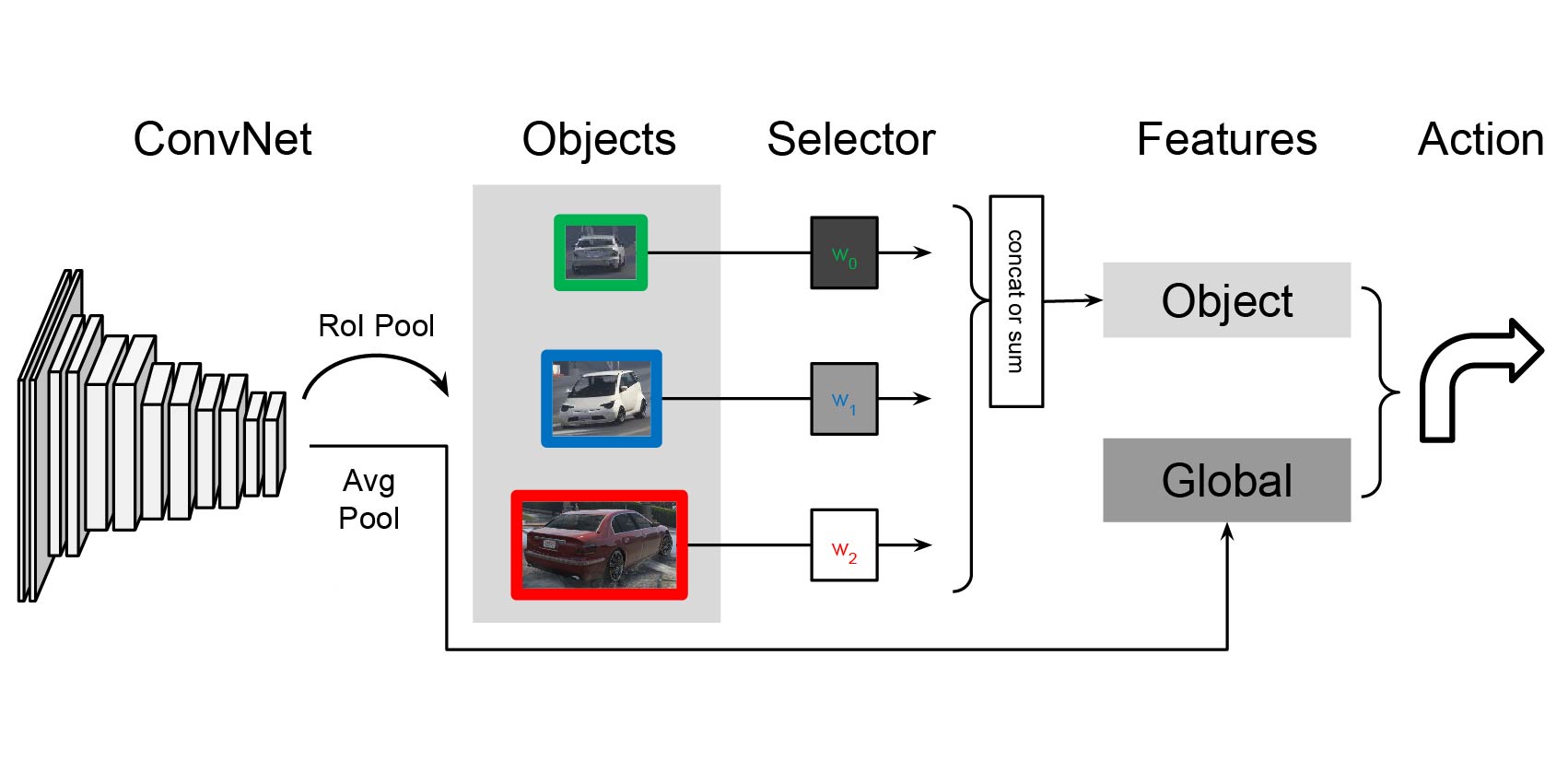
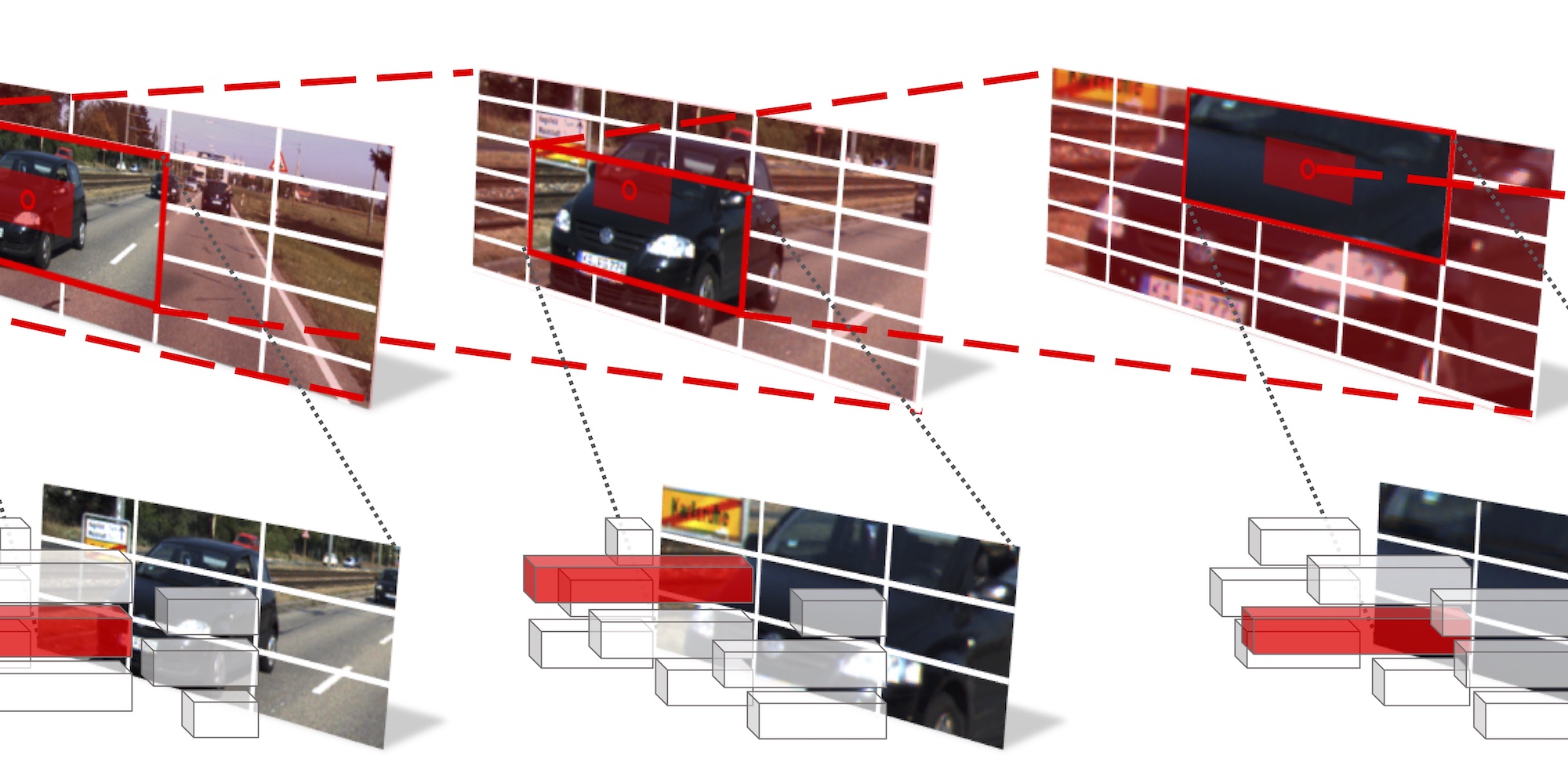
Deep Object-Centric Policies for Autonomous Driving
ICRA 2019 We show that object-centric models outperform object-agnostic methods in scenes with other vehicles and pedestrians.

SkipNet: Learning Dynamic Routing in Convolutional Networks
ECCV 2018 We introduce SkipNet, a modified residual network, that uses a gating network to selectively skip convolutional blocks based on the activations of the previous layer.
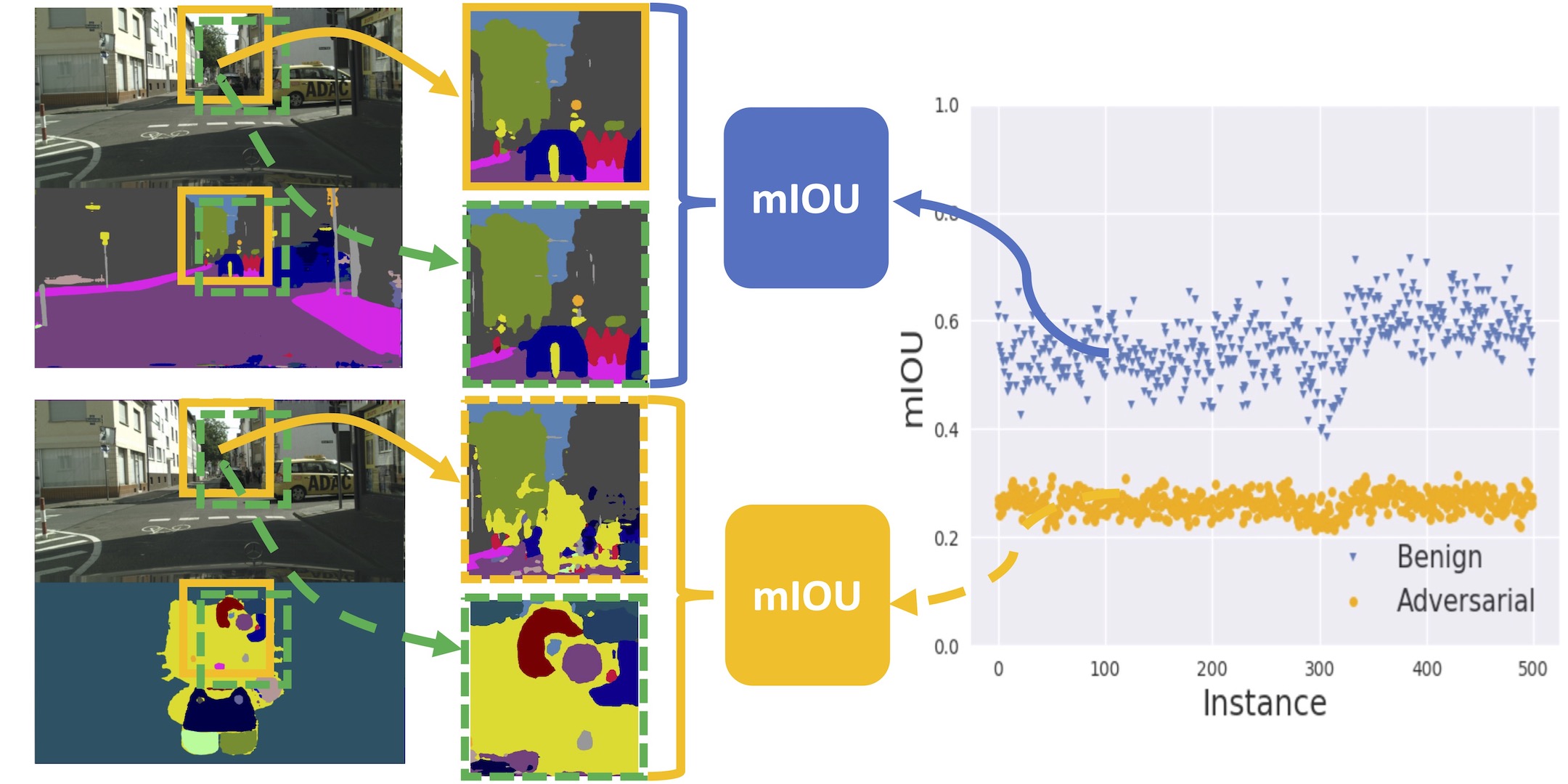
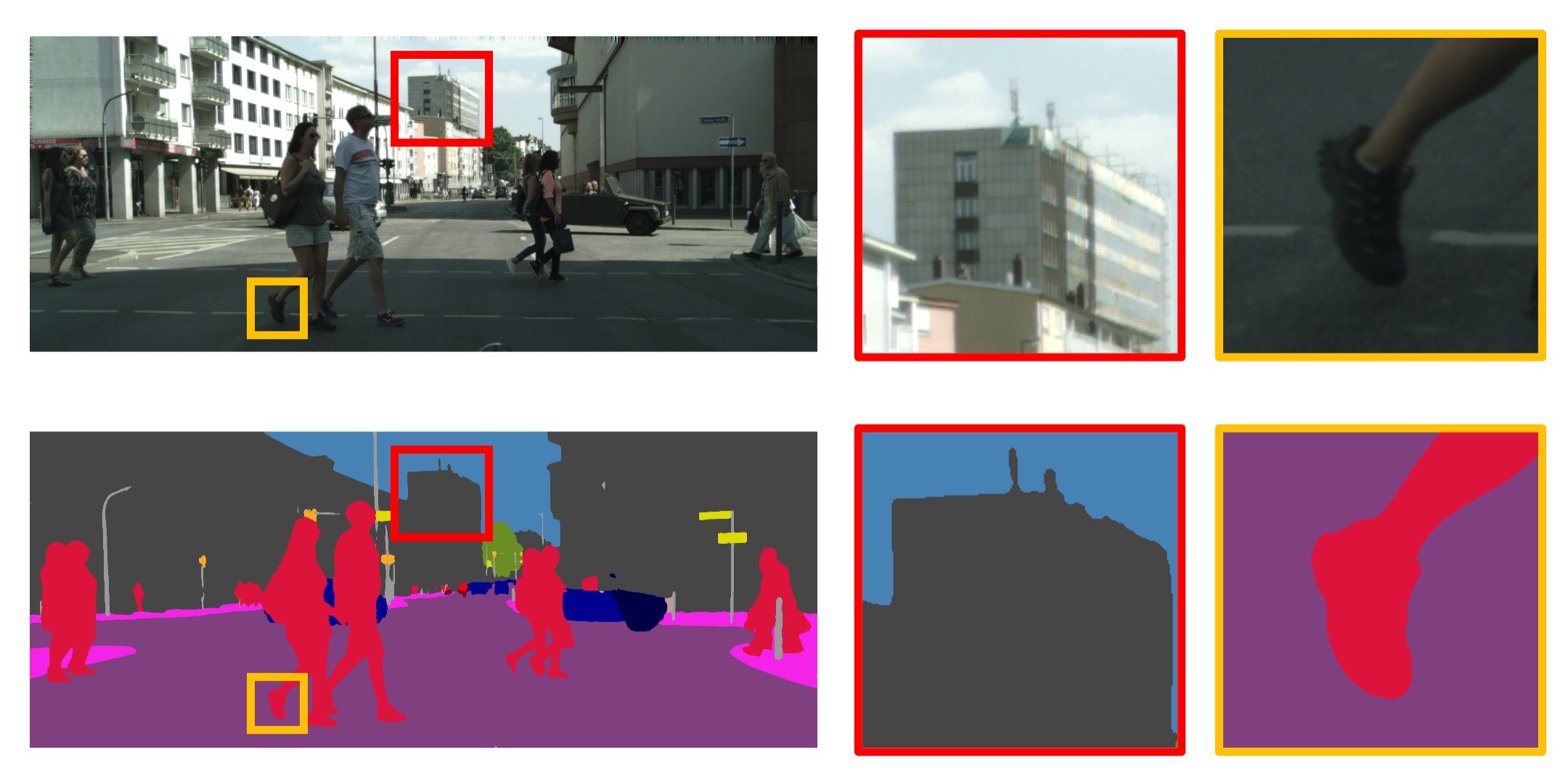
Characterizing Adversarial Examples Based on Spatial Consistency Information for Semantic Segmentation
ECCV 2018 We aim to characterize adversarial examples based on spatial context information in semantic segmentation.
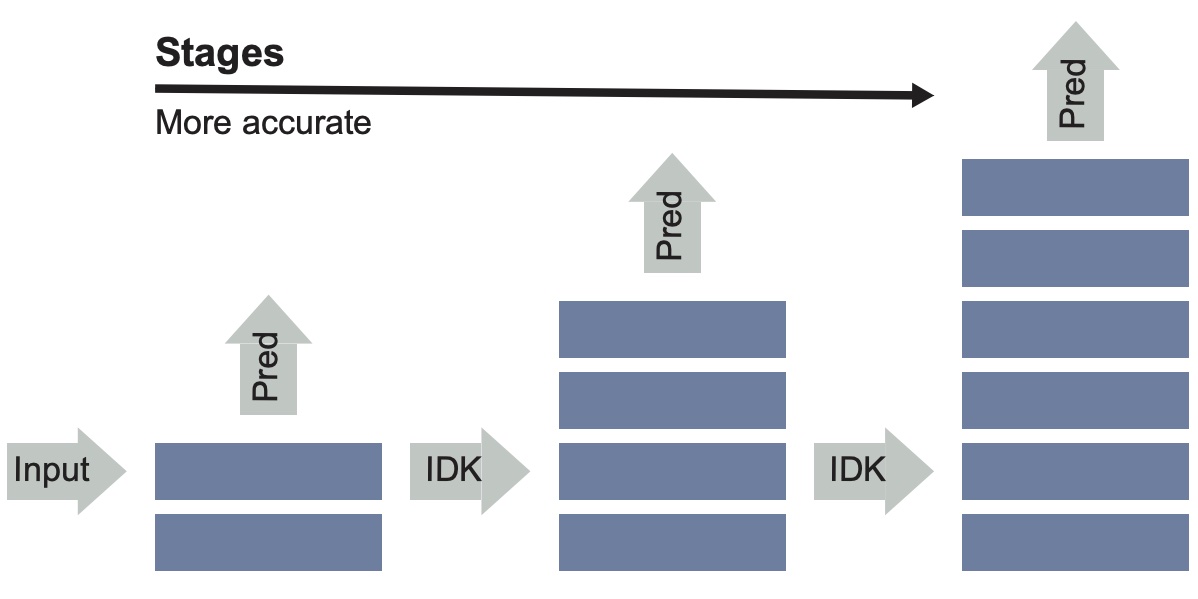
IDK Cascades: Fast Deep Learning by Learning not to Overthink
UAI 2018 We introduce the “I Don’t Know” (IDK) prediction cascades framework to accelerate inference without a loss in prediction accuracy.
Deep Layer Aggregation
CVPR 2018 Oral We augment standard architectures with deeper aggregation to better fuse information across layers.

TextureGAN: Controlling Deep Image Synthesis with Texture Patches
CVPR 2018 Spotlight We develop a local texture loss in addition to adversarial and content loss to train the generative network.

PairedCycleGAN: Asymmetric Style Transfer for Applying and Removing Makeup
CVPR 2018 We introduce an automatic method for editing a portrait photo so that the subject appears to be wearing makeup in the style of another person in a reference photo.
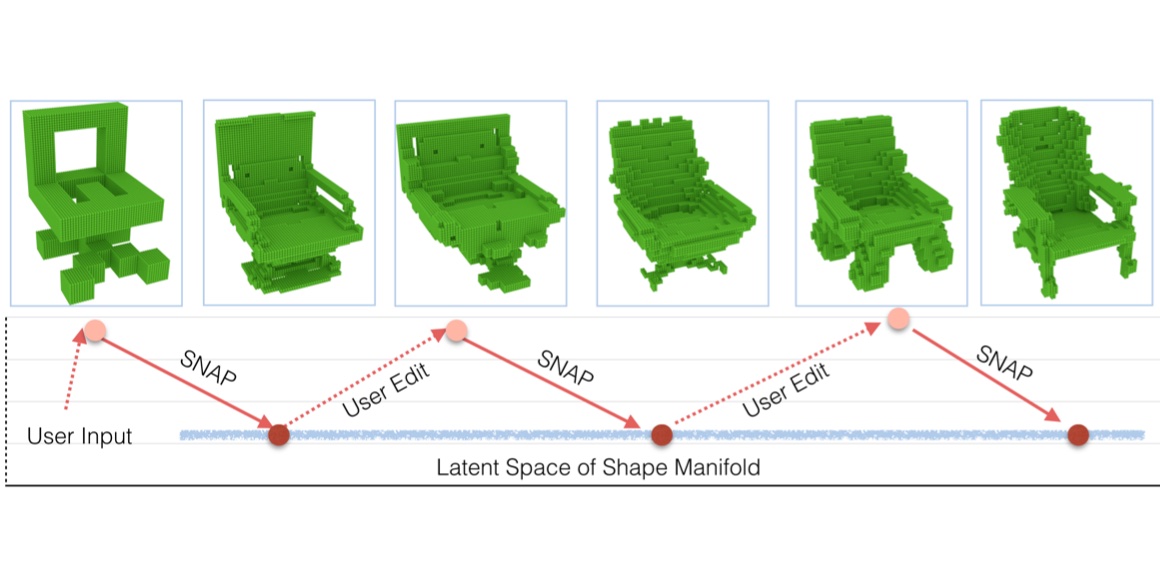
Interactive 3D Modeling with a Generative Adversarial Network
3DV 2017 We propose using a generative adversarial network (GAN) to assist a novice user in designing real-world shapes with a simple interface.
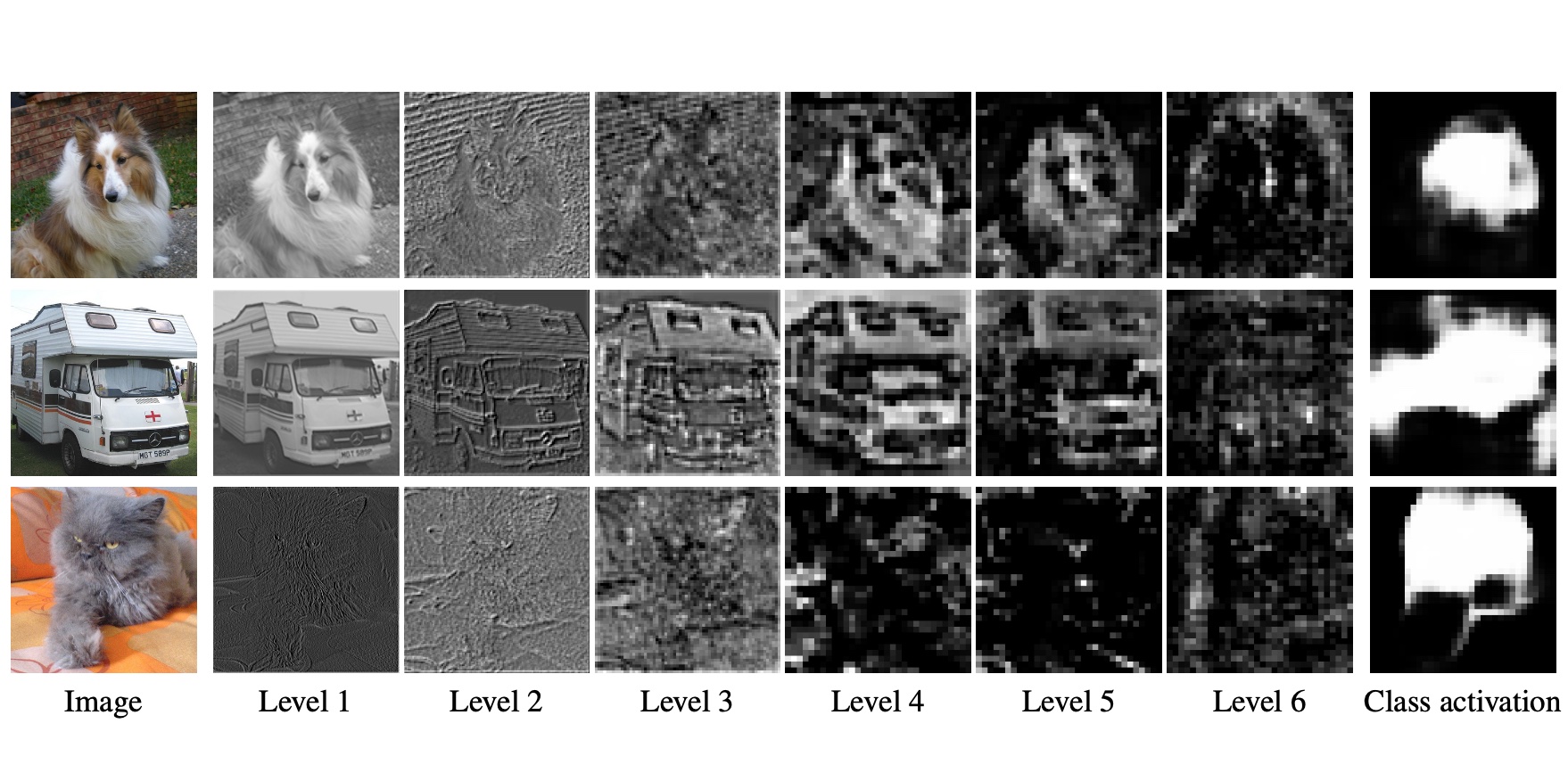
Dilated Residual Networks
CVPR 2017 We show that dilated residual networks (DRNs) outperform their non-dilated counterparts in image classification without increasing the model’s depth or complexity.
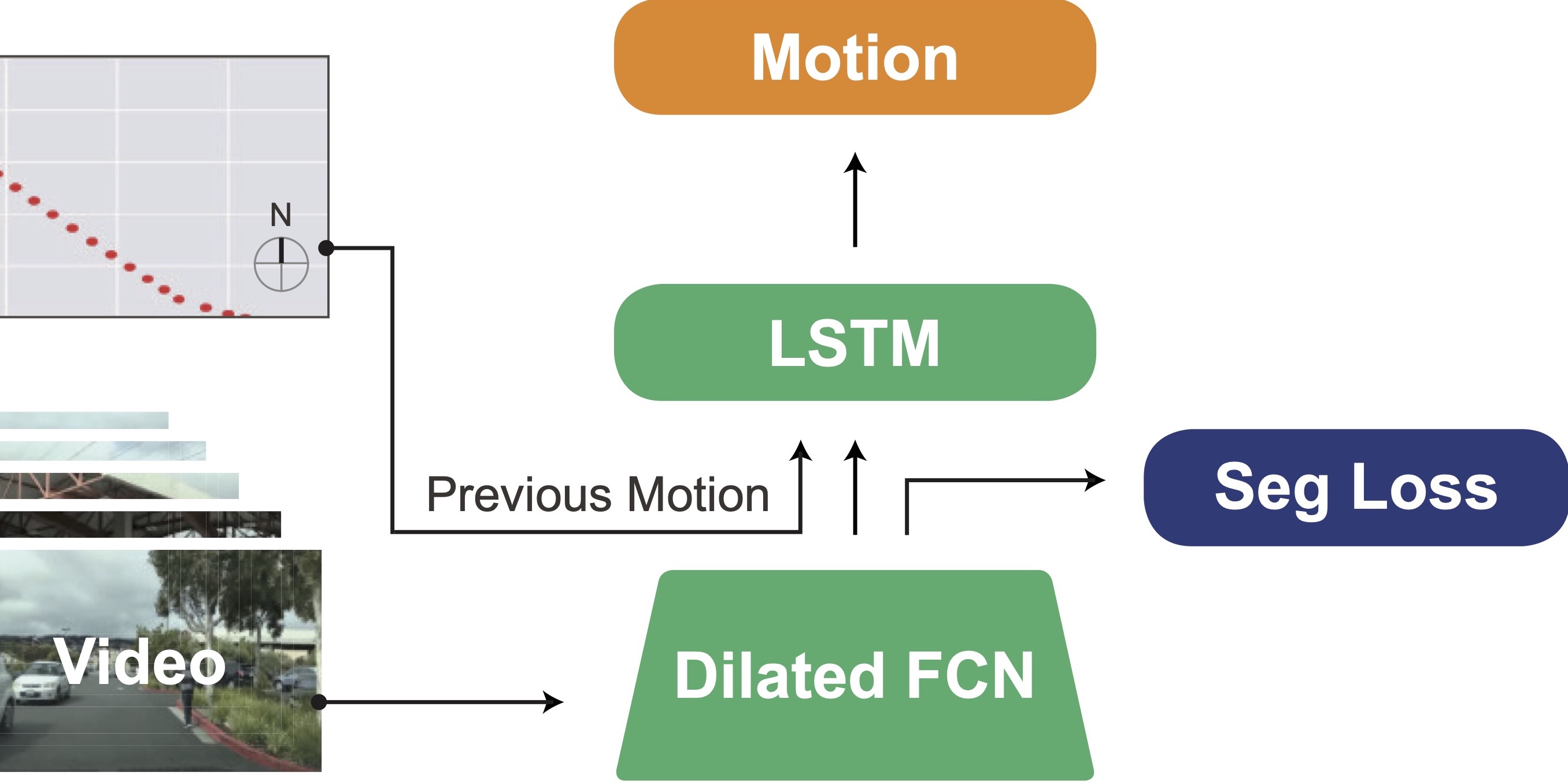
End-to-end Learning of Driving Models from Large-scale Video Datasets
CVPR 2017 Oral We develop an end-to-end trainable architecture for learning to predict a distribution over future vehicle egomotion from instantaneous monocular camera observations and previous vehicle state.
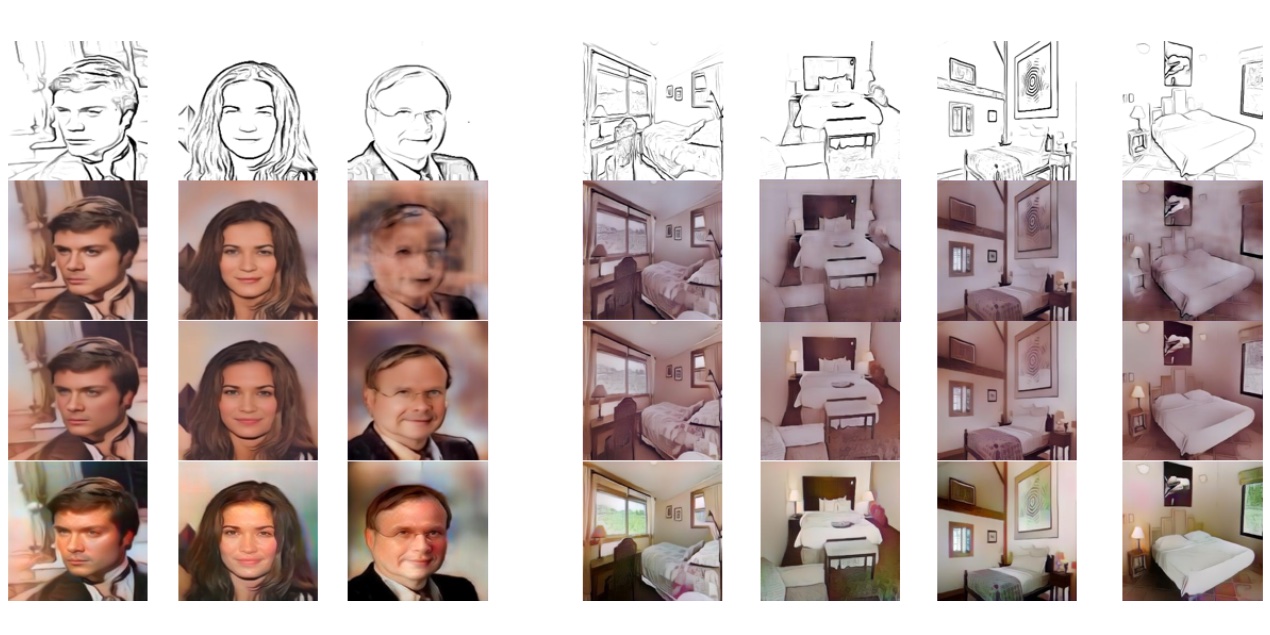
Scribbler: Controlling Deep Image Synthesis with Sketch and Color
CVPR 2017 We propose a deep adversarial image synthesis architecture that is conditioned on sketched boundaries and sparse color strokes to generate realistic images.
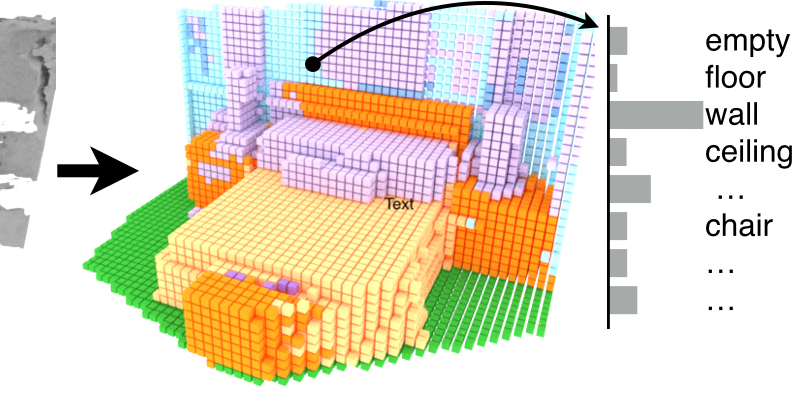
Semantic Scene Completion from a Single Depth Image
CVPR 2017 Oral Our network uses a dilation-based 3D context module to efficiently expand the receptive field and enable 3D context learning.
SHREC’17 Track Large-Scale 3D Shape Retrieval from ShapeNet Core55
3DOR 2017 This track provides a benchmark to evaluate large-scale 3D shape retrieval based on the ShapeNet dataset.

FCNs in the Wild: Pixel-level Adversarial and Constraint-based Adaptation
arXiv 2016 We introduce the first domain adaptive semantic segmentation method, proposing an unsupervised adversarial approach to pixel prediction problems.
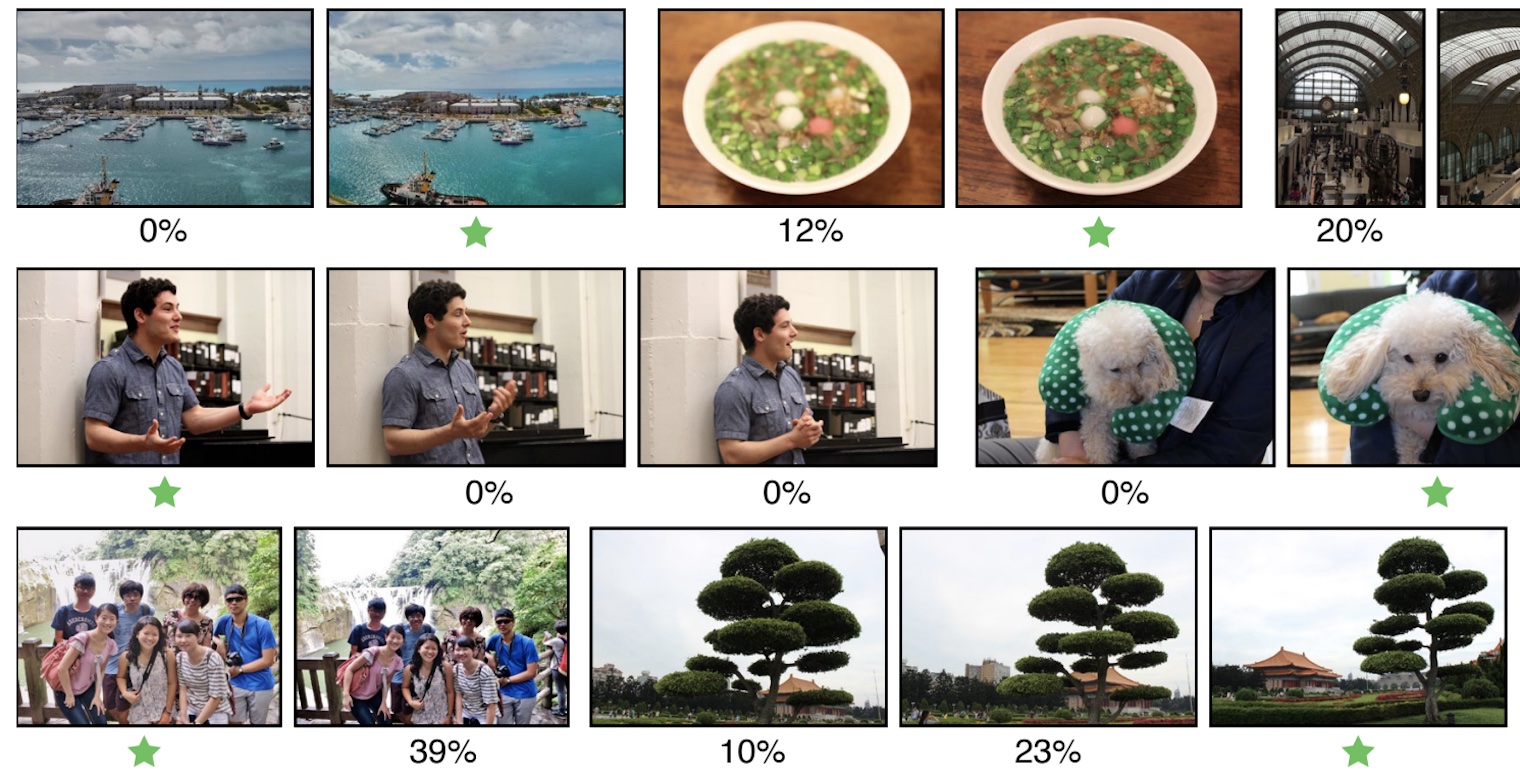
Automatic Triage for a Photo Series
Siggraph 2016 We seek a relative quality measure within a series of photos taken of the same scene, which can be used for automatic photo triage.
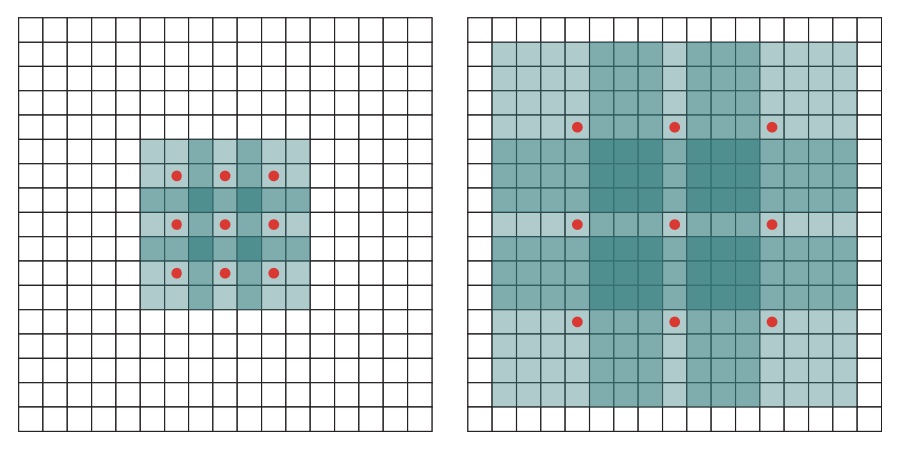
Multi-Scale Context Aggregation by Dilated Convolutions
ICLR 2016 We study dilated convolution in depth. It has become a foundamental network operation.
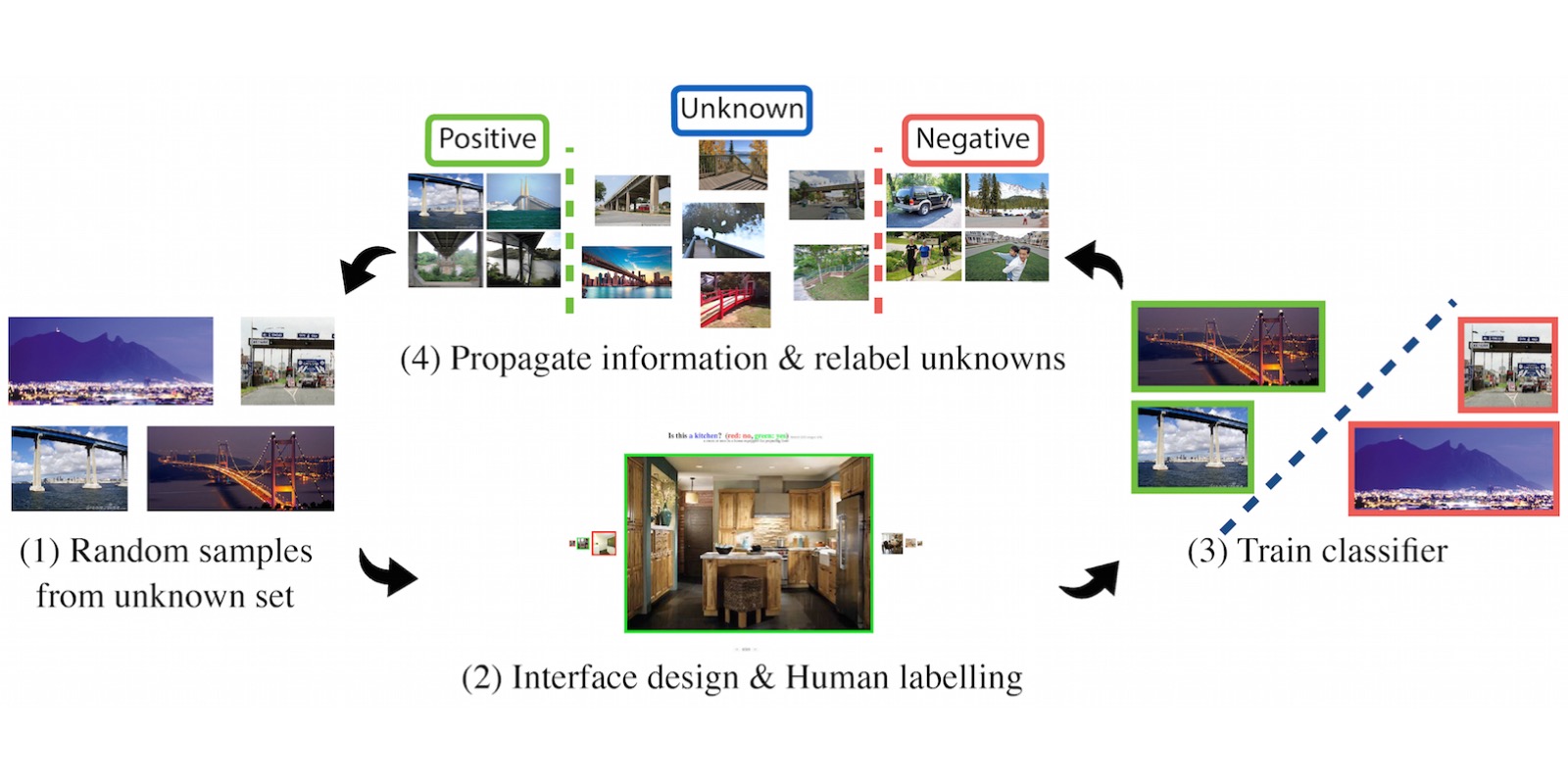
LSUN: Construction of a Large-scale Image Dataset using Deep Learning with Humans in the Loop
arXiv 2015 We propose to amplify human effort through a partially automated labeling scheme, leveraging deep learning with humans in the loop.

Semantic Alignment of LiDAR Data at City Scale
CVPR 2015 We propose an automatic algorithm for global alignment of LiDAR data collected with Google Street View cars in urban environments.
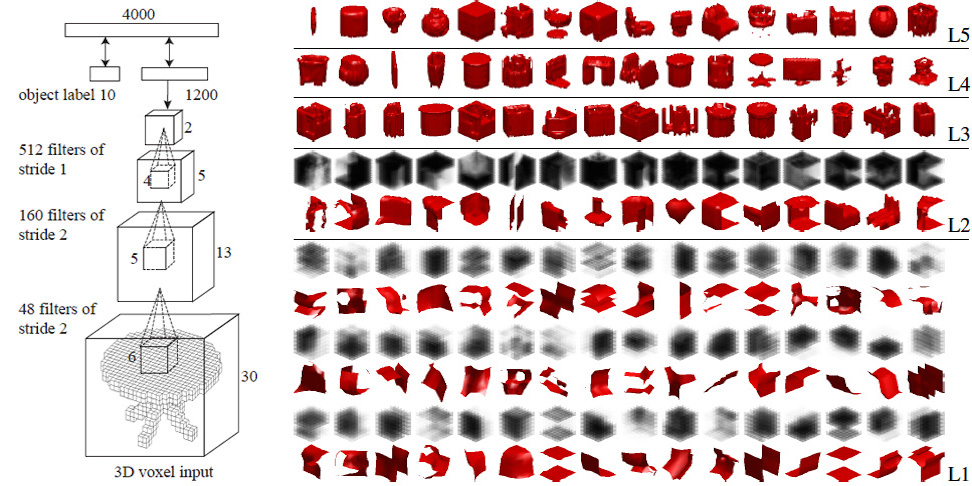
3D ShapeNets: A Deep Representation for Volumetric Shapes
CVPR 2015 Oral We propose to represent a geometric 3D shape as a probability distribution of binary variables on a 3D voxel grid.
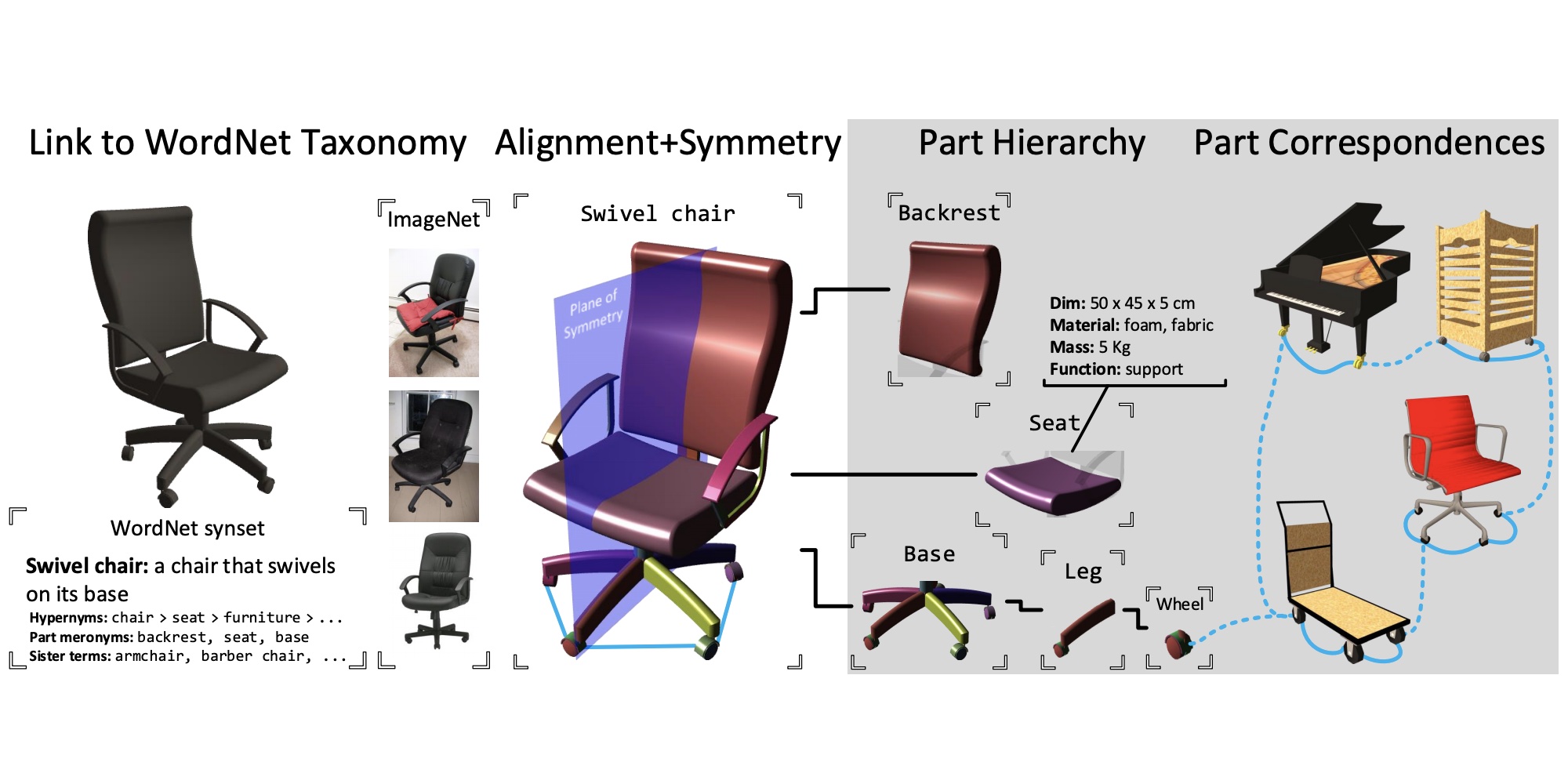
ShapeNet: An Information-Rich 3D Model Repository
arXiv 2015 We present ShapeNet: a richly-annotated, large-scale repository of shapes represented by 3D CAD models of objects.

3D Reconstruction from Accidental Motion
CVPR 2014 We have discovered that 3D reconstruction can be achieved from a single still photographic capture due to accidental motions of the photographer.